Implementation of control task for event handling and messaging. More...
#include <meshx_control_task.h>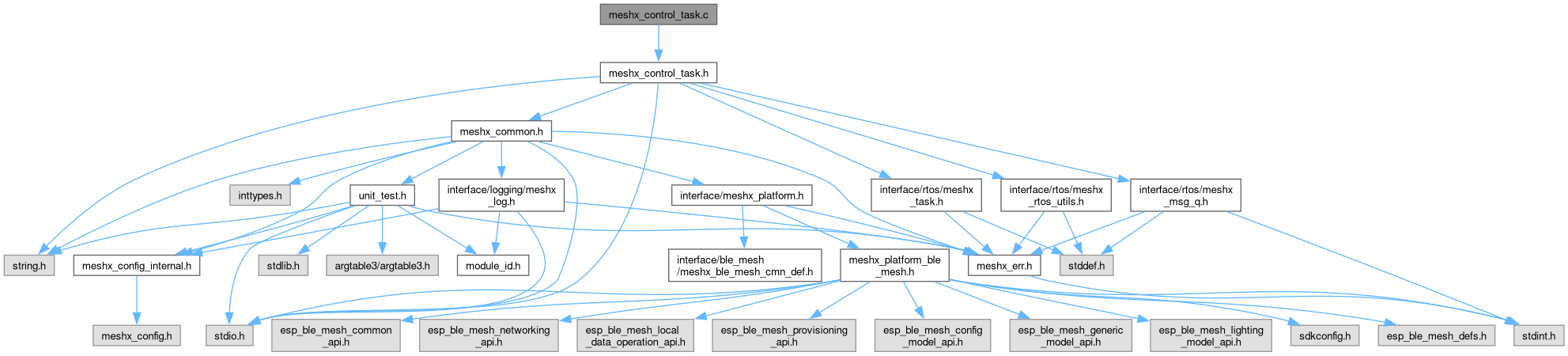
Go to the source code of this file.
Functions | |
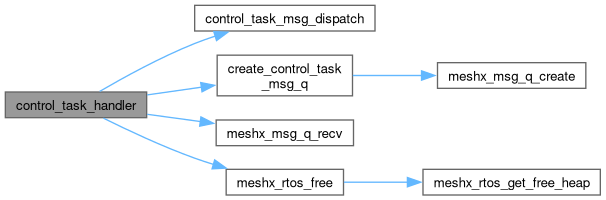
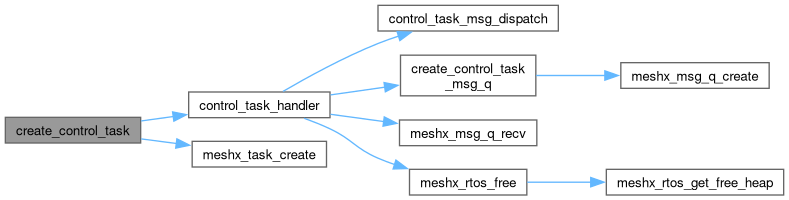
| static void | control_task_handler (void *args) |
| Task handler function for processing control task messages. | |
| meshx_err_t | create_control_task (dev_struct_t *pdev) |
| Create the control task. | |
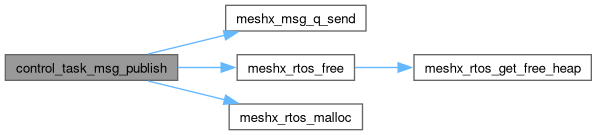
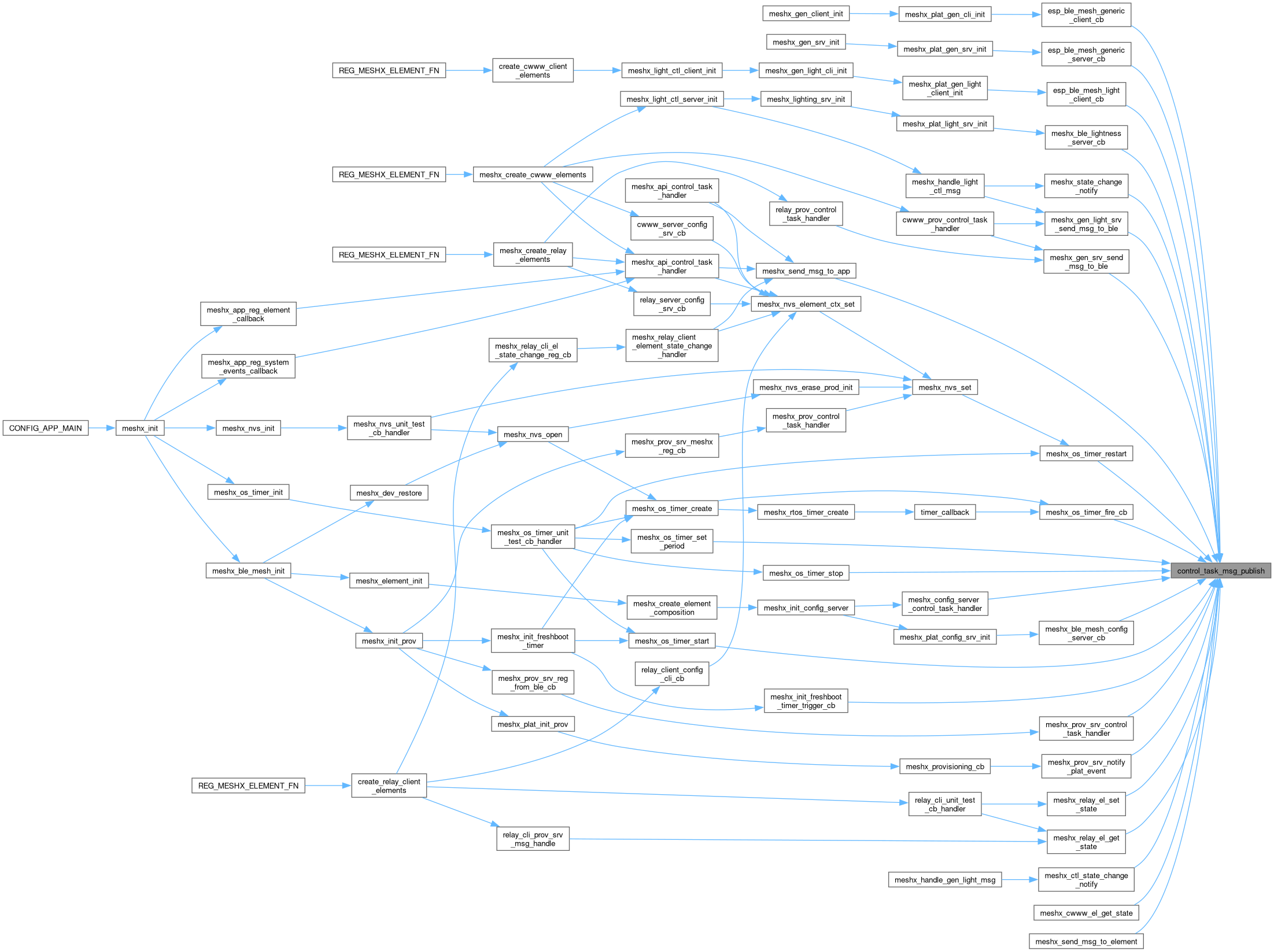
| meshx_err_t | control_task_msg_publish (control_task_msg_code_t msg_code, control_task_msg_evt_t msg_evt, const void *msg_evt_params, size_t sizeof_msg_evt_params) |
| Publish a control task message. | |
| meshx_err_t | control_task_msg_subscribe (control_task_msg_code_t msg_code, control_task_msg_evt_t evt_bmap, control_task_msg_handle_t callback) |
| Subscribe to a control task message. | |
| meshx_err_t | control_task_msg_unsubscribe (control_task_msg_code_t msg_code, control_task_msg_evt_t evt_bmap, control_task_msg_handle_t callback) |
| Deregister a callback for a specific message code and event bitmap. | |
| static meshx_err_t | control_task_msg_dispatch (dev_struct_t *pdev, control_task_msg_code_t msg_code, control_task_msg_evt_t evt, void *params) |
| Dispatch a message to the registered callbacks. | |
| static meshx_err_t | create_control_task_msg_q (void) |
| Create the control task message queue. | |
Variables | |
| static meshx_msg_q_t | control_task_queue |
| Queue handle for control task messages. | |
| static control_task_evt_cb_reg_t * | control_task_msg_code_list_heads [CONTROL_TASK_MSG_CODE_MAX] |
| Linked list heads for registered callbacks per message code. | |
Detailed Description
Implementation of control task for event handling and messaging.
Copyright © 2024 - 2025 MeshX
This file contains the implementation of a control task, including functions for creating the task, sending messages, registering message handlers, and handling events. The control task uses FreeRTOS for inter-task communication and event-driven architecture.
Definition in file meshx_control_task.c.
Function Documentation
◆ control_task_handler()
|
static |
Task handler function for processing control task messages.
This function runs in a loop, receiving messages from the queue and dispatching them to registered handlers. Allocated memory for message parameters is freed after processing.
- Parameters
-
[in] args Pointer to the device structure (dev_struct_t) passed during task creation.
Definition at line 247 of file meshx_control_task.c.

◆ control_task_msg_dispatch()
|
static |
Dispatch a message to the registered callbacks.
This function dispatches a message to the registered handlers based on the message code and event type.
- Parameters
-
[in] pdev Pointer to the device structure (dev_struct_t). [in] msg_code The message code of the received message. [in] evt The event type of the received message. [in] params Pointer to the message parameters.
- Returns
- MESHX_SUCCESS on success, or an error code on failure.
Definition at line 192 of file meshx_control_task.c.

◆ control_task_msg_publish()
| meshx_err_t control_task_msg_publish | ( | control_task_msg_code_t | msg_code, |
| control_task_msg_evt_t | msg_evt, | ||
| const void * | msg_evt_params, | ||
| size_t | sizeof_msg_evt_params ) |
Publish a control task message.
This function allows you to publish a control task message with the given message code, event, and event parameters. The message will be sent to the control task for processing.
- Parameters
-
[in] msg_code The message code to publish. [in] msg_evt The event associated with the message. [in] msg_evt_params Pointer to the event parameters. [in] sizeof_msg_evt_params Size of the event parameters.
- Returns
- MESHX_SUCCESS on success, or an error code on failure.
Definition at line 66 of file meshx_control_task.c.
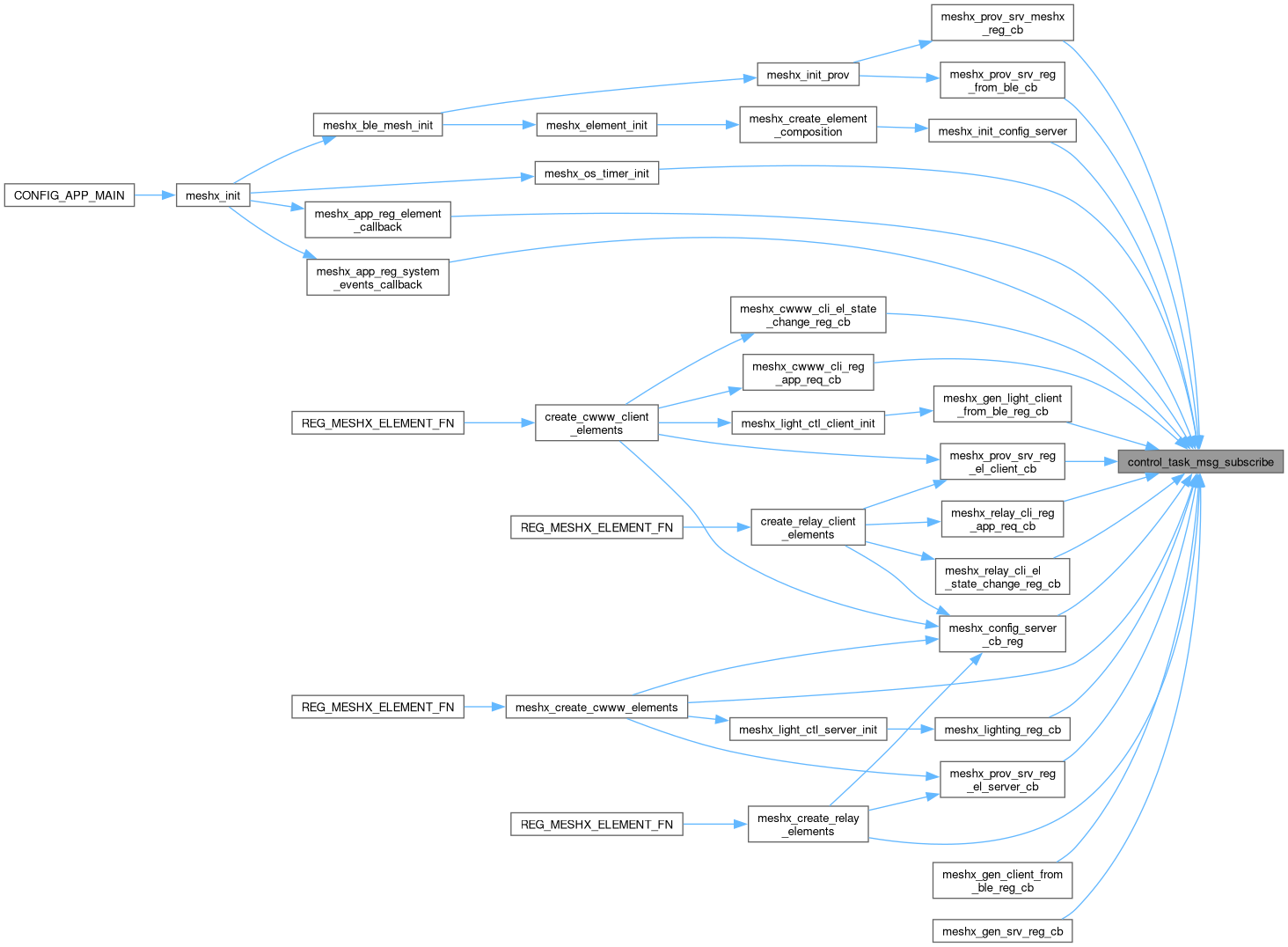
◆ control_task_msg_subscribe()
| meshx_err_t control_task_msg_subscribe | ( | control_task_msg_code_t | msg_code, |
| control_task_msg_evt_t | evt_bmap, | ||
| control_task_msg_handle_t | callback ) |
Subscribe to a control task message.
This function allows you to subscribe to a specific control task message identified by the given message code. When the message is received, the specified callback function will be invoked.
- Parameters
-
[in] msg_code The message code to subscribe to. [in] evt_bmap The event bitmap associated with the message. [in] callback The callback function to be called when the message is received.
- Returns
- MESHX_SUCCESS: Success
- MESHX_INVALID_ARG: Invalid argument
- MESHX_FAIL: Other failures
Definition at line 122 of file meshx_control_task.c.

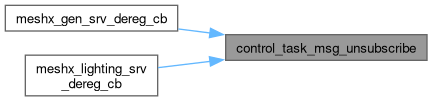
◆ control_task_msg_unsubscribe()
| meshx_err_t control_task_msg_unsubscribe | ( | control_task_msg_code_t | msg_code, |
| control_task_msg_evt_t | evt_bmap, | ||
| control_task_msg_handle_t | callback ) |
Deregister a callback for a specific message code and event bitmap.
This function allows deregistering a callback handler for a specific message code and event type.
- Parameters
-
[in] msg_code The message code to deregister the handler for. [in] evt_bmap Bitmap of events to deregister for. [in] callback Callback function to deregister.
- Returns
- MESHX_SUCCESS on success, or an error code on failure.
Definition at line 152 of file meshx_control_task.c.

◆ create_control_task()
| meshx_err_t create_control_task | ( | dev_struct_t * | pdev | ) |
Create the control task.
This function creates a FreeRTOS task to handle control events.
- Parameters
-
[in] pdev Pointer to the device structure (dev_struct_t).
- Returns
- MESHX_SUCCESS on success, or an error code on failure.
Definition at line 40 of file meshx_control_task.c.

◆ create_control_task_msg_q()
|
static |
Create the control task message queue.
This function initializes the FreeRTOS queue for handling control task messages.
- Returns
- MESHX_SUCCESS on success, or an error code on failure.
Definition at line 234 of file meshx_control_task.c.


Variable Documentation
◆ control_task_msg_code_list_heads
|
static |
Linked list heads for registered callbacks per message code.
Definition at line 30 of file meshx_control_task.c.
◆ control_task_queue
|
static |
Queue handle for control task messages.
Definition at line 21 of file meshx_control_task.c.