Implementation of RTOS timer abstraction for MeshX using FreeRTOS. This file provides functions to create, start, stop, delete, reset, and modify RTOS timers in the MeshX framework. More...
#include "interface/rtos/meshx_rtos_timer.h"#include "interface/logging/meshx_log.h"#include "freertos/FreeRTOS.h"#include "freertos/timers.h"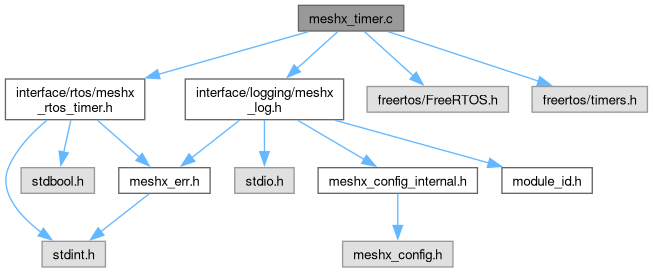
Go to the source code of this file.
Functions | |
| static void | timer_callback (TimerHandle_t xTimer) |
| Callback function for FreeRTOS timer events. | |
| meshx_err_t | meshx_rtos_timer_create (meshx_rtos_timer_t *timer, const char *name, meshx_rtos_timer_callback_t cb, void *arg, uint32_t period_ms, bool reload) |
| Creates a new RTOS timer. | |
| meshx_err_t | meshx_rtos_timer_start (meshx_rtos_timer_t *timer) |
| Starts the RTOS timer. | |
| meshx_err_t | meshx_rtos_timer_stop (meshx_rtos_timer_t *timer) |
| Stops the RTOS timer. | |
| meshx_err_t | meshx_rtos_timer_delete (meshx_rtos_timer_t *timer) |
| Deletes the RTOS timer. | |
| meshx_err_t | meshx_rtos_timer_change_period (meshx_rtos_timer_t *timer, uint32_t new_period_ms) |
| Changes the period of the RTOS timer. | |
| meshx_err_t | meshx_rtos_timer_reset (meshx_rtos_timer_t *timer) |
| Resets the RTOS timer. | |
Detailed Description
Implementation of RTOS timer abstraction for MeshX using FreeRTOS. This file provides functions to create, start, stop, delete, reset, and modify RTOS timers in the MeshX framework.
Copyright (c) 2024 - 2025 MeshX
Definition in file meshx_timer.c.
Function Documentation
◆ meshx_rtos_timer_change_period()
| meshx_err_t meshx_rtos_timer_change_period | ( | meshx_rtos_timer_t * | timer, |
| uint32_t | new_period_ms ) |
Changes the period of the RTOS timer.
This function changes the period of an active or dormant RTOS timer.
- Parameters
-
[in] timer Pointer to the meshx_rtos_timer_t structure. [in] new_period_ms New timer period in milliseconds.
- Returns
- meshx_err_t Returns MESHX_SUCCESS if the timer period was changed successfully, or an error code if the change operation failed.
Definition at line 154 of file meshx_timer.c.

◆ meshx_rtos_timer_create()
| meshx_err_t meshx_rtos_timer_create | ( | meshx_rtos_timer_t * | timer, |
| const char * | name, | ||
| meshx_rtos_timer_callback_t | cb, | ||
| void * | arg, | ||
| uint32_t | period_ms, | ||
| bool | reload ) |
Creates a new RTOS timer.
This function initializes and creates a new RTOS timer with the specified parameters.
- Parameters
-
[out] timer Pointer to the meshx_rtos_timer_t structure to be initialized. [in] name Timer Name String [in] cb Callback function to be invoked when the timer expires. [in] arg Argument to be passed to the callback function. [in] period_ms Timer period in milliseconds. [in] reload Flag set if timer is a auto reload type.
- Returns
- meshx_err_t Returns MESHX_SUCCESS if the timer was created successfully, or an error code if the creation failed.
Definition at line 46 of file meshx_timer.c.


◆ meshx_rtos_timer_delete()
| meshx_err_t meshx_rtos_timer_delete | ( | meshx_rtos_timer_t * | timer | ) |
Deletes the RTOS timer.
This function deletes the RTOS timer and frees associated resources.
- Parameters
-
[in] timer Pointer to the meshx_rtos_timer_t structure.
- Returns
- meshx_err_t Returns MESHX_SUCCESS if the timer was deleted successfully, or an error code if the delete operation failed.
Definition at line 129 of file meshx_timer.c.

◆ meshx_rtos_timer_reset()
| meshx_err_t meshx_rtos_timer_reset | ( | meshx_rtos_timer_t * | timer | ) |
Resets the RTOS timer.
This function resets the RTOS timer, causing it to restart from its beginning.
- Parameters
-
[in] timer Pointer to the meshx_rtos_timer_t structure.
- Returns
- meshx_err_t Returns MESHX_SUCCESS if the timer was reset successfully, or an error code if the reset operation failed.
Definition at line 178 of file meshx_timer.c.

◆ meshx_rtos_timer_start()
| meshx_err_t meshx_rtos_timer_start | ( | meshx_rtos_timer_t * | timer | ) |
Starts the RTOS timer.
This function starts the RTOS timer.
- Parameters
-
[in] timer Pointer to the meshx_rtos_timer_t structure.
- Returns
- meshx_err_t Returns MESHX_SUCCESS if the timer was started successfully, or an error code if the start operation failed.
Definition at line 83 of file meshx_timer.c.

◆ meshx_rtos_timer_stop()
| meshx_err_t meshx_rtos_timer_stop | ( | meshx_rtos_timer_t * | timer | ) |
Stops the RTOS timer.
This function stops the RTOS timer.
- Parameters
-
[in] timer Pointer to the meshx_rtos_timer_t structure.
- Returns
- meshx_err_t Returns MESHX_SUCCESS if the timer was stopped successfully, or an error code if the stop operation failed.
Definition at line 106 of file meshx_timer.c.

◆ timer_callback()
|
static |
Callback function for FreeRTOS timer events.
This function is triggered when the associated FreeRTOS timer expires. It invokes the meshx_os_timer_fire_cb function to handle the timer event.
- Parameters
-
xTimer Handle to the FreeRTOS timer that triggered the callback.
Definition at line 26 of file meshx_timer.c.

